Lineare Abbildung
Graphisch
© 2016
- 2026
Basiswissen|
Definition einer linearen Abbildung über Vektoren|
Definition einer linearen Abbildung in der Analysis|
Matrizen für lineare Abbildungen|
Fußnoten
Basiswissen
Eine lineare Abbildung [1] oder lineare Transformation [2] wird oft in Verbindung mit Veränderungen von 2D- oder 3D-Figuren über Matrizen behandelt. Diese Anwendung wird hier kurz vorgestellt.
Definition einer linearen Abbildung über Vektoren
Das Wort lineare Abbildung wird zunächst mit Hilfe von Vektoren [4] definiert: "Bei einer linearen Abbildung ist es unerheblich, ob man zwei Vektoren zuerst addiert und dann deren Summe abbildet oder zuerst die Vektoren abbildet und dann die Summe der Bilder bildet. Gleiches gilt für die Multiplikation mit einem Skalar aus dem Grundkörper." [1]
Definition einer linearen Abbildung in der Analysis
Was oben für Vektoren definiert wird, kann auch auf Funktionen der Analysis übertragen werden. Die Rolle der Vektoren sind dann die Funktionsargument v₁ und v₂ sowie die dafür möglichen Funktionswerte:
- f(v₁+v₂)=f(v₁)+f(v₂)
- f(a·v)=a·f(v)
Bei einer linearen Abbildung im Sinne der Analysis ist es unerheblich, ob man zwei Funktionsargumente (v₁ und v₂) zuerst addiert und dann den Funktionswert für deren Summe berechnet oder zuerst die Funktionswerte der zwei Argumente einzeln bildet und die Funktionswerte dann addiert. Gleiches gilt sinngemäß auch für die Multiplikation. Die erste Bedingung bezeichnet man auch als Additivität, die zweite als Homogenität. [3]
Matrizen für lineare Abbildungen
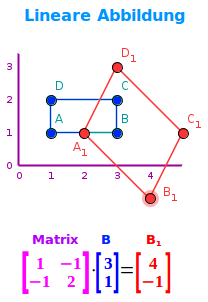
Man stelle sich ein xy-Koordinatensystem vor. In ihm werden vier Punkte definiert: A(1|1), B(3|1), C(3|2) sowie D(1|2). Diese vier Punkte bilden die Ecken eines Rechtecks. Jeder der Punkte kann auch als Ortsvektor gedacht werden. Nun sei eine quadratische Matrix gegeben: (1,1|-1,2). Die ersten zwei Zahlen entsprechen der ersten Zeile, die letzten zwei Zahlen der zweiten Zeile. Nun kann man diese Matrix mit jedem einzelnen der Eckpunkt-Vektoren multiplizieren. Dabei entstehen vier neue Punkte: A'(2|1), B'(4|-1), C'(5|1) sowie D'(3|3). Diese vier neuen Punkte haben das ursprüngliche Rechteck zum einen gedreht und zum anderen in ein schiefes Parallelogramm verwandelt. Es gibt nun bestimmte Matrizentypen, die immer zu bestimmten Typen einer Abbildung oder Transformation gehören. Die folgenden Transformationen sind lineare Abbildung:
- 90°-Drehung gegen den Uhrzeigersinn: (0;-1|1;0)
- Drehung um den Winkel θ gegen die Uhr: (cosθ;-sinθ|sinθ;cosθ) 👉 Drehmatrix
- Spiegelung an der x-Achse: (1;0|0;-1)
- Spiegelung an der y-Achse: (-1;0|0;1)
- Spiegelung an Gerade mit Winkel θ: (cos2θ;-sin2θ|sin2θ;cos2θ)
- Vergrößerung um Faktor 2: (2;0|0;2)
- Horizontale Scherung: (1;m|0;1)
- Horizontale Stauchung: (k;0|0;1/k)
- Projektion auf die y-Achse: (0;0|0;1)
Fußnoten
- [1] Die Definition "Bei einer linearen Abbildung ist es unerheblich, ob man zwei Vektoren zuerst addiert und dann deren Summe abbildet oder zuerst die Vektoren abbildet und dann die Summe der Bilder bildet. Gleiches gilt für die Multiplikation mit einem Skalar aus dem Grundkörper." stammt aus dem Wikipedia Artikel "lineare Abbildung", abgerufen am 2. Juni 2024. Online: https://de.wikipedia.org/wiki/Lineare_Abbildung
- [2] Das Spektrum Lexikon der Mathematik setzt lineare Abbildung und lineare Transformation gleich und definiert für beide formal: "(v₁+v₂)=f(v₁)+f(v₂)" und "f(av)=af(v)". In: Guido Walz: Spektrum Lexikon der Mathematik. Band 3: Imp bis Mon; 2002; ISBN: 3-8274-0435-5. Siehe auch 👉 Spektrum Lexikon der Mathematik
- [3] Wenn Additivität und Homogenität gelten, spricht man auch von Superposition: "Die erste Bedingung wird als Additivität bezeichnet, die zweite als Homogenität. In der Technik faßt man beide Bedingungen manchmal unter der Bezeichnung Superpositionsprinzip zusammen." In: Guido Walz: Spektrum Lexikon der Mathematik. Band 3: Imp bis Mon; 2002; ISBN: 3-8274-0435-5. Diese Definition ist deckungsgleich mit der Definition für eine sogenannte 👉 Superposition
- [4] Ein Vektor wird typischerweise als ein Pfeil in einem zwei- oder dreidimensionalen Koordinatensystem dargestellt. Für solche Pfeile sind dann verschiedene Rechenoperationen wie die Addition, Subtraktion, verschiedene Multiplikation (aber keine Division) definiert. Siehe mehr unter 👉 Vektor
Mit Google weiter auf Rhetos suchen
- [1] Die Definition "Bei einer linearen Abbildung ist es unerheblich, ob man zwei Vektoren zuerst addiert und dann deren Summe abbildet oder zuerst die Vektoren abbildet und dann die Summe der Bilder bildet. Gleiches gilt für die Multiplikation mit einem Skalar aus dem Grundkörper." stammt aus dem Wikipedia Artikel "lineare Abbildung", abgerufen am 2. Juni 2024. Online: https://de.wikipedia.org/wiki/Lineare_Abbildung
- [2] Das Spektrum Lexikon der Mathematik setzt lineare Abbildung und lineare Transformation gleich und definiert für beide formal: "(v₁+v₂)=f(v₁)+f(v₂)" und "f(av)=af(v)". In: Guido Walz: Spektrum Lexikon der Mathematik. Band 3: Imp bis Mon; 2002; ISBN: 3-8274-0435-5. Siehe auch 👉 Spektrum Lexikon der Mathematik
- [3] Wenn Additivität und Homogenität gelten, spricht man auch von Superposition: "Die erste Bedingung wird als Additivität bezeichnet, die zweite als Homogenität. In der Technik faßt man beide Bedingungen manchmal unter der Bezeichnung Superpositionsprinzip zusammen." In: Guido Walz: Spektrum Lexikon der Mathematik. Band 3: Imp bis Mon; 2002; ISBN: 3-8274-0435-5. Diese Definition ist deckungsgleich mit der Definition für eine sogenannte 👉 Superposition
- [4] Ein Vektor wird typischerweise als ein Pfeil in einem zwei- oder dreidimensionalen Koordinatensystem dargestellt. Für solche Pfeile sind dann verschiedene Rechenoperationen wie die Addition, Subtraktion, verschiedene Multiplikation (aber keine Division) definiert. Siehe mehr unter 👉 Vektor